
В статье рассматриваются причины низкой разрешающей способности камеры LROC лунного разведчика LRO. Сравниваются различные инженерные подходы к проектированию камер высокого разрешения "лунного" и "марсианского" разведчиков. Проблемы достаточности освещенности, смазывания изображения при движении фотокамеры с высокой скоростью по орбите и используемые схемы. Оцениваются возможности LROC при применении в нем решений аналогичных марсианской камере высокого разрешения HIRISE. Анализируются такие факторы, как дифракционный предел оптики, размерность, тип, соответствие применяемой матрицы фокусному расстоянию объектива и ее "адекватность" реализованному инженерному решению. Показано вопиющее рассогласование оптической и цифровой части телескопа, а также полное отсутствие каких-либо мероприятий по борьбе с орбитальным смазыванием изображения и способов увеличения выдержки. С учетом того, что в других космических камерах применение подобных инженерных решений являются очевидным, "стандартным" и уже хорошо отработанными на практике, можно вполне уверенно утверждать, что высокая разрешающая способность LROC была занижена искусственно или, что то же самое, сознательно нереализована.
— Взгляни на дорогу, кого ты там видишь?
— Никого.
— Мне бы такое зрение — увидеть никого, да еще на таком расстоянии
Алиса в Зазеркалье"
В статье рассматриваются причины низкой разрешающей способности камеры LROC лунного разведчика LRO. Оцениваются такие факторы как дифракционный предел оптики, достаточность освещенности и смазывание изображения при движении фотокамеры с высокой скоростью по орбите вокруг луны. Сравниваются различные инженерные подходы к проектированию камер высокого разрешения "лунного" и "марсианского" разведчиков. Оцениваются возможности LROC при применении в нем решений аналогичных марсианской камере высокого разрешения HIRISE.
12 августа 2005 года произошло одно интересное событие. С космодрома с мыса Канаверал стартовал марсианский космический разведчик. MRO. Выведен при помощи носителя Атлас 5. Масса 2180 кг. Среди прочего оборудования на разведчике была установлена камера высокого разрешения HIGH RESOLUTION IMAGING SCIENCE EXPERIMENT (HIRISE)
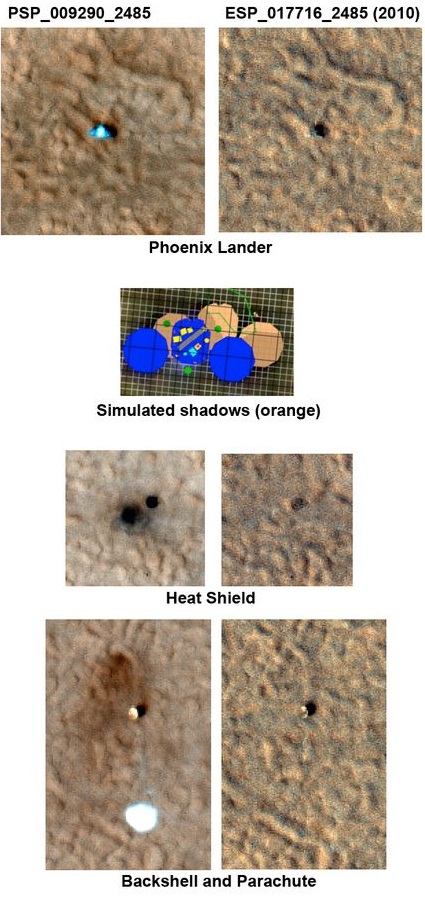
Камера и в самом деле хороша. Она, к примеру, умудрилась сфотографировать приземля... , - примарсяющийся Феникс на парашютике.

И даже на поверхности марса отлично видела его полутораметровое тельце с растопыренными ладошками солнечных батарей, отброшенную теплозащиту и лежащий на "земле" парашютик с крышкой.
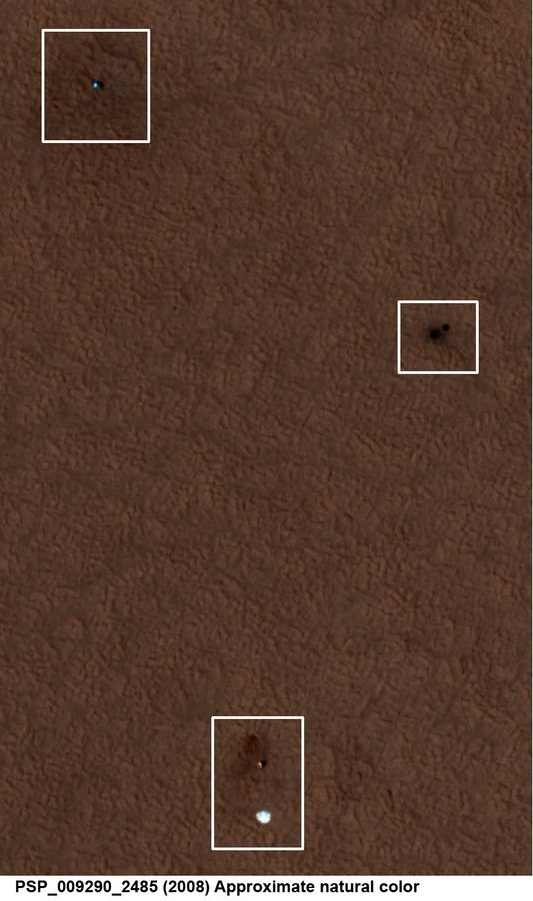
По этим же снимкам в 2008 и 2010 году замолчавшему Фениксу ставили диагноз.
Эти фотографии тем более поразительны, если понимаешь, что съемка велась не с забетонированного телескопного "штатива", а "с рук", с 300-километровой орбиты, сквозь искажающие турбулентности и дымку атмосферы Марса.
Что же представляет собой эта фотокамера?
Оптическая схема "Кассегрена" (окуляр находится в центре главного зеркала). Диаметр зеркала 0,5 метра. Угловая разрешающая способность 1 микрорадиан. (Т.е. с высоты 300 км. это примерно 30 см. на пиксель.)
Хороший это результат или плохой? Много или мало?
Для сравнения я полез в первый подвернувшийся интернет-магазин, торгующий телескопами, и просмотрел ближайшие, сравнимые по апертуре, телескопы.
Вот пример телескопа с диаметром зеркала 406 мм. имеет разрешающую способность 0,28 угловых секунды. Переведем их в радианы, - получим 1,3 микрорадиана. Вполне согласующийся результат, тем более что его зеркало немного меньше, а разрешающая способность растет обратно пропорционально размерам апертуры телескопа. (Ну, в том смысле, что чем больше линейный размер зеркала, тем пропорционально меньше разрешаемый угловой размер.)
Существуют различные эмпирические формулы, но они ориентировочны. Например: "Критерий разрешения по двойным звездам выведен в XIX веке астрономом-любителем Дауэсом и получил название предела Дауэса. Значение, определяющее минимальное различимое угловое расстояние между двойными звездами, имеющими одинаковый блеск, определяется по формуле 116/D, где D=диаметр телескопа в мм." Результат получается в угловых секундах. (Это для случая, когда парная звезда еще сливается, но уже можно различить, что это не одна точка.) По другой версии разрешение r=140/D, где D - диаметр объектива в миллиметрах, r - разрешение в угловых секундах. (Для длины волны света в середине видимого диапазона - 560 нм.) Разумеется, эти формулы годятся лишь для зеркал отшлифованных с необходимым уровнем точности, которая должна соблюдаться на уровне 1/8-1/10 длины волны. Точное же значение можно определить только на практике. Так как не все зеркала можно считать одинаково "кривыми" и качественно отшлифованными. К тому же разрешение зависит от длины волны, в которой ведется наблюдение. Поэтому более строго разрешающая способность определяется по критерию Рэлея φ = 1,22 λ /D, где λ - длина волны света, D - диаметр объектива оптической системы. Но нам для оценок в оптическом (400-700 нм) диапазоне (HIRISE имеет диапазон чуть шире - 400-1000 нм) вполне достаточно эмпирических формул.
Оценим по ним возможное разрешение HIRISE:
116/500=0,232 угл.сек.=1,12 µrad.
Так что параметры оптики HIRISE можно заслуженно считать отличными и честно заявленными (т.е. согласующимися с разрешением на представленных снимках), и на пределе "теоретических возможностей" данной конструкции. Наши "оценки" хоть и фиксируют некоторую "хвастливость", но вполне реалистичны.
И вот NASA, накопив опыт в постройке прекрасных космических телескопов, спустя 4 года (19 июня 2009 года) отправляет к луне еще более современный и совершенный аппарат. LRO (Lunar Reconnaissance Orbiter).
Давайте попробуем оценить в цифрах то, что визуально заметили уже многие. А именно - разницу в качестве фотоматериала, полученного этими космическими разведчиками. Сопоставима ли она? Можно ли пренебречь "некоторыми недостатками" и объяснить их "объективными причинами"?
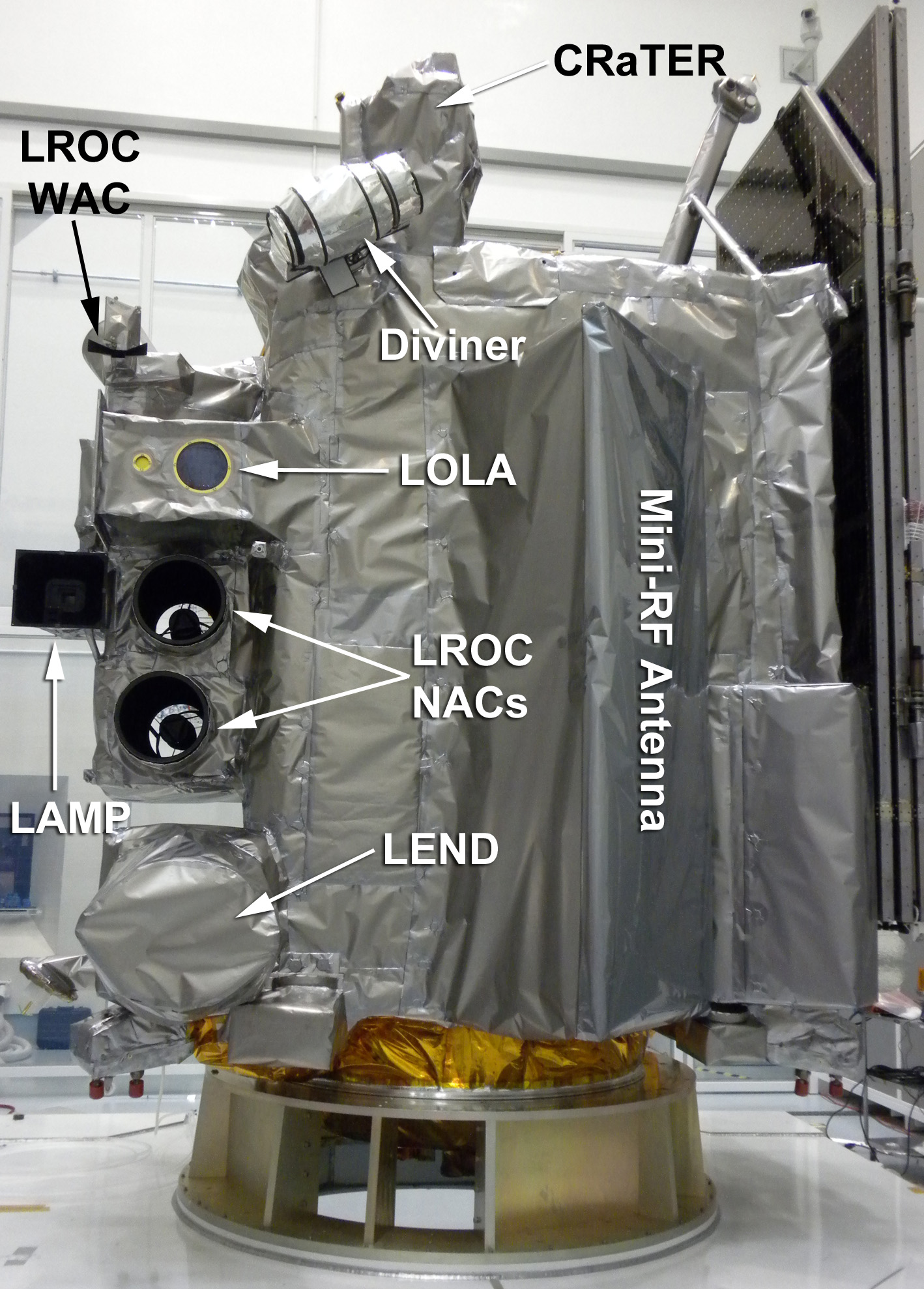
Масса спутника LRO - 1846 кг. Выводится аналогичным носителем Атлас 5. То есть разведчики по массе и энергетике одного класса. (Хотя в нагрузку на этом же носителе выводился еще один аппарат LCROSS. 534 кг.) Из фотопринадлежностей на нем устанавливается LROC (Lunar Reconnaissance Orbiter Camera). Среди задач миссии - съемка "всех мест, связанных с деятельностью человека: мест посадок пилотируемых кораблей «Аполлон», американских и советских автоматических станций, а также кратеров, образовавшихся при падении искусственных спутников Луны и других аппаратов".
Вполне реализуемая задача. Так как "штатная" орбита LRO всего 50 км. от поверхности. Да и снимаемые объекты - не полутораметровый Феникс, а вполне себе "четырехметровые" посадочные ступени... а с учетом опор, то и все 10 метров в поперечнике. Одни только метровые тарелки посадочных опор (всего-то в полтора раза меньшие чем Феникс). К тому же никаких помех от атмосферы. Условия идеальные.
И пошли фотографии. К сожалению, первые из них не отличались качеством. Но в августе 2011 г., NASA , не пожалев ограниченного запаса топлива на целый месяц, опустило орбиту LRO до 21 км. над поверхностью (вернулся на 50 километровую орбиту 6 сентября). (интересно, сколько было истрачено топлива при смене орбит? И не проще ли было вместо этой рискованной операции, просто установить отлично зарекомендовавший себя HIRISE. Всего-то 50 кг разницы.) И вот они, долгожданные снимки обескураживающе высокого разрешения.
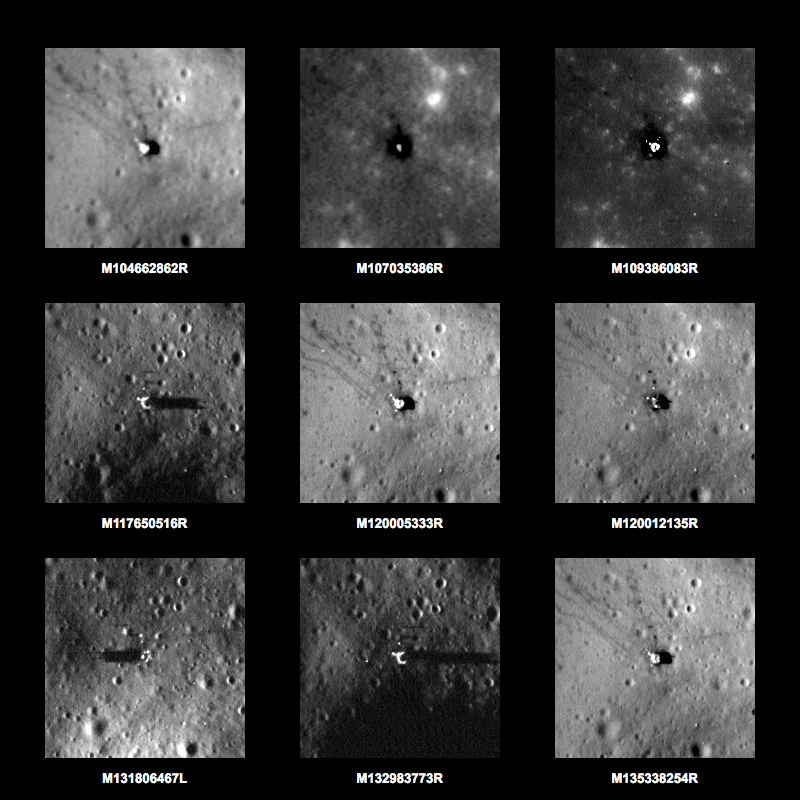
http://lroc.sese.asu.edu/news/uploads/9_ap12_lms.png
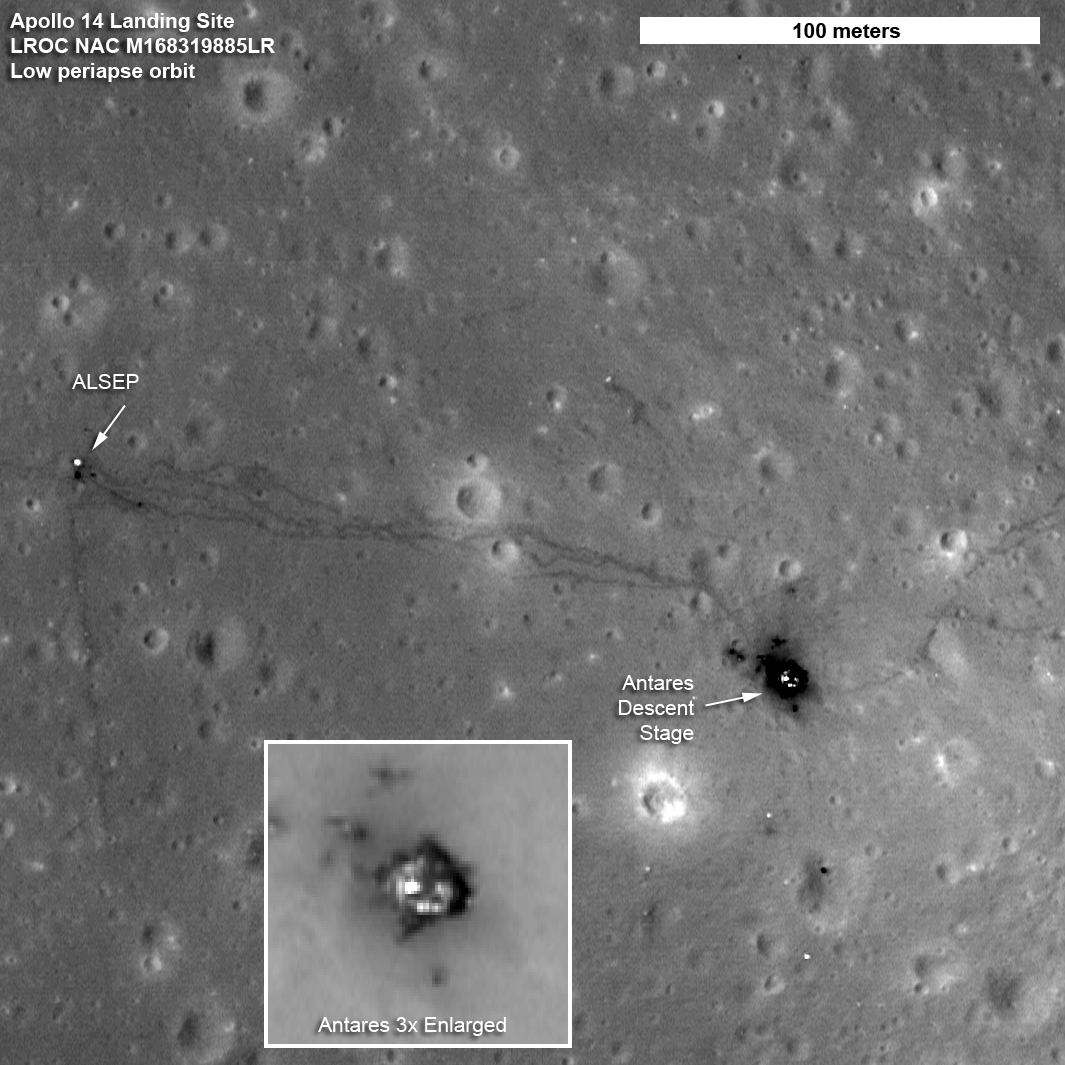
http://www.nasa.gov/images/content/584395main_M168319885_LR.25cm_ap14_area.jpg
(К слову: Эта дешевая мешанина исходных данных и необходимость проверять каждый шаг
сильно
утомляют. Как опозорившийся шахматист, стремящийся посильнее смешать фигуры на
доске. По указанному номеру M168319885_LR без труда отыскивается
уже "улучшеный" "исходник". в котором английским по белому написано
"не 25 см".
Дата - Start Time:
2011-08-18 15:16:58 UTC
Высота - Spacecraft Altitude: 25.381 km
Разрешение - Pixel Scale: 0.428 m/pix
 А
в лунном атласе LROC обнаруживается
исходник исходника, в котором уже искажены пропорции и совсем трудно
что-либо угадать. (Изображение посадочного модуля можно найти в центре полосы
справа)
А
в лунном атласе LROC обнаруживается
исходник исходника, в котором уже искажены пропорции и совсем трудно
что-либо угадать. (Изображение посадочного модуля можно найти в центре полосы
справа)
Вот он же увеличенный мною в те же три раза. Похоже?
На всякий случай уточняю. Это не разные снимки одного и того же места. Это один и тот же снимок, с одним и тем же каталожным номером. Просто "специалисты" над ним немного поработали. (Хотя все равно результат не впечатляет.)
Искажение вообще говоря неудивительно, так как разрешение в разных направлениях
неодинаково:
Разрешение поперек орбиты Scaled
pixel width 0.3
Разрешение вдоль орбиты
Scaled pixel height 0.56
Высота орбиты
Spacecraft altitude 25.38
Причину, почему так все перекошено и что за бардак с разрешениями мы разберем ниже.
Здесь вообще много фотографий модулей в исходном разрешении
(Apollo
Landing Sites -> Individual
Images). Без труда находятся снимки с орбитами чуть больше 20 км. Но,
странное дело, практически двукратное понижение орбиты не приводит к
пропорциональному росту разрешения в описании внизу.
Например сравните с вышеуказанным.
Spacecraft Altitude: 45.290 km
Pixel Scale: 0.499 m/pix)
Ну да ладно. Посадочные модули сняты, но почему разрешение фотографии "заявлено" в 25 см?
С 30-ю сантиметрами на пиксель у марсианского разведчика все понятно. У него 300-километровая орбита, марсианская атмосфера, хоть и тонкая, но мешает... а в "тепличных" условиях, в которых фотографирует LRO, он сделал бы снимки с разрешением... синус одного микрорадиана... на 21 тысячу метров..... - два(!) сантиметра. Это ни много, ни мало 45-50 пикселов на каждую посадочную тарелку опоры и на сам посадочный модуль пришлось бы около 200. При таком разрешении даже в следах космонавтов можно было бы попытаться разглядеть отпечатавшийся протектор.
Объяснить "погрешностями" такой огромный разброс разрешающей способности между двумя разведчиками невозможно. Здесь что-то на аппаратном уровне.
Давайте рассмотрим оптическое оборудование лунного разведчика внимательнее.
Что представляет собой LROC?
(К сожалению, ссылка на оригинал уже не существует. Скачать исходный LROC_Fact_Sheet_v3.pdf файл с данными по LROC можно здесь или здесь)
Это точно такой же Кассегрен. Оговорено, что в модификации Ричи-Кретьена (форма зеркал), но у него зачем-то уменьшили диаметр главного зеркала до 195 мм. Зачем? Чтобы стало хуже?
Ну хорошо. Пусть уменьшили диаметр зеркала в 2,5 раза. (Может быть экономили массу. HIRISE весит 65 кг против 15,2 кг LROC). Но в таком случае разрешающая способность должна составить порядка ~ 5 см. (Это по ~ 15 пикселей на каждую тарелку посадочной опоры.) Но мы ведь имеем не 5, а 25 см. Это не "на каких-то 15-20%" потери качества... это в пять раз(!) хуже.
Может быть, я чего-то не понимаю или ошибся в расчетах? Давайте заглянем в наш интернет-магазин и посмотрим, что он нам предложит из развлекательной бытовой оптики с диаметром зеркала около 200 мм. Обычный, древний рефлектор Ньютона с диаметром зеркала 200 мм. за 500 долларов предлагает разрешение 0,56 угловой секунды. Это 2,7 микрорадиана. А "наш" "космический девайс" обеспечивает разрешение в целых 10 микрорадиан. Причем даже не "по факту", а прямо по задекларированному "паспорту". (Вот его спецификации.) Мне трудно представить, что NASA ищет зеркала для своей оптики на барахолке в Каире. Но заявленное разрешение (2 угловых секунды или 10 µrad.) обеспечивает обычный бинокль из интернет-магазина с объективом 50 мм.
Характеристики
бинокля Yukon (Юкон) БЗ 30x50
Световой диаметр объектива, мм - 50
Разрешение, угл. секунд - 2"
Нехитрая оценка бинокля по пределу Дауэса дает нам сопоставимый с заявленным
результат.
116/50=2,32 угл. сек = 11 мкРад.
Почти в точности как у нашего
"космического" телескопа.
Но давайте оценим возможную разрешающую способность LROC по этой же эмпирической формуле
"предела Дауэса":
116/195=0,59 угл.сек.=2,86 мкРад.
Т.е. примерно такую, 2,86 микрорадиана разрешающую способность имела бы бытовая игрушка с сопоставимым LROC диаметром зеркала в "интернет-магазине". (У нас же, напомню, "по паспорту" 10 мкРад.)
По каким-то причинам заявленная разрешающая способность LROC примерно в четыре раза не соответствует физическим возможностям, которые могут достигаться в описанной технической реализации... не то что в "космическом", но даже на бытовом, развлекательно-любительском уровне. Если же сравнивать с разрешением, достигнутым в в камере марсианского разведчика HIRISE, то эта разница составляет ~ 5 раз (В том смысле, если мы условно приведем диаметры их зеркал к одной величине. В реальности же их собственных зеркал разница в разрешающей способности десятикратна.).
Другими словами, все рассмотренные нами примеры и на "игрушечно-бытовом" и на "космическом" уровне выдают корректные и сопоставимые результаты между заявленными параметрами разрешающей способности и их конструктивными решениями. Разброс идет лишь на уровне погрешности вычислений и "неучитываемости" длины волны света в разных частях видимого диапазона. Все, кроме одного. Кроме LROC. Объяснить заявленные параметры "погрешностью" невозможно. Слишком она велика.
Если выразить в цифрах, то физическая разрешающая способность корректно изготовленного 195 миллиметрового объектива с высоты 21 км. должна быть около 5 см. (если мы ориентируемся на качество изготовления великолепного HIRISE) и около 6 см. (если мы смотрим на бытовые игрушки из интернет-магазина).
На 4-х метровый корпус посадочного модуля должно приходиться примерно 65-80 разрешаемых "пикселей" (не путать с пикселами оцифровки, количество которых может быть любым). На тарелку опоры около 15 пикселей. То есть изображение, которое должно быть снято реальным LROC должно быть примерно в четыре-пять раз(!) "крупнее" и "подробнее", чем то, что заявлено и предъявлено NASA.
Ну в самом деле. Смотришь на сравнение космических телескопов и становится горько и обидно, что современный LROC видит хуже, чем даже запущенный за 20 лет до него Галилео (к тому же и с меньшим зеркалом.) А уж полутораметровый и хитросделаный Мидас, тот вообще различает 2 см со 100 километров. (заметьте, LROC почему то в список не включен. Наверное потому, что Луна не планета.)
Сравнение прошлых, текущих и будущих систем обработки изображений для планетарных научных миссий.
| System | Aperture size | System resources | Spectral capability | Ground sample distance (GSD) | |
| 100 km | 250.000 km | ||||
| Galileo SSI | 17 cm | 29 kg, 90 cm x 25 cm x 30 cm, 23 W | 8 filters, 375-1100 nm | ~1 m/px | ~2.5 km/px |
| HiRise | 0.5 m | 65 kg. 113 cm x 59 cm dia, 125 W | 3 band multispectral, 400-1000 nm | ~0.10 m/px | ~250 m/px |
| IKONOS | 0.7 m | 171 kg, 1.52 mx 0.79 m dia, 350 W | 4 band multispectral, 445-853 nm | ~0.12 m/px | ~200 m/px |
| MIDAS | 1.5 m | 250 kg, 1.6 m x 1.6 m x 1.5 m, 200 W | Imaging spectrometer ~nm resolution | ~ 2 cm/px | ~50 m/px |
Что же такого нужно было привезти на Луну 40 лет назад, что до сих пор это стыдно показать миру?
******************
Так как уже не в первый раз возникают споры о том, что разрешение
космического телескопа определяется не оптикой, а величиной «смаза» изображения
формируемого на матрице спутником летящим на первой космической, давайте
рассмотрим подробнее и этот вопрос и попробуем понять, что именно не позволяет увеличить
разрешающую способность LROC?
Вообще говоря, помимо разрешающей способности оптики, которая напрямую связана с
«апертурой приемной антенны» (диаметром объектива) и является основным «узким
местом» при длиннофокусной фотографии (когда размер пятна дифракционного
размытия превышает физические размеры пиксела матрицы, чего
практически нет в бытовой, «короткофокусной» фотографии, где даже
посредственная оптика легко формирует «точку» много меньше физического размера
пиксела матрицы и о «дифракционном пределе» можно говорить лишь при очень сильно
закрытой диафрагме). Разработчику необходимо
держать в голове ряд других, тесно взаимосвязанных и, зачастую,
взаимоисключающих факторов.
Таких как:
1) взаимное сопряжение разрешающей способности оптики с используемым
фотоприемником (матрицей).
2) в случае движущегося объекта съемки (а это именно наш случай. Первая
космическая скорость на Марсе около 3,55 км/сек На Луне – 1,68 км/сек),
необходима крайне малая выдержка для того, чтобы избежать размазывания кадра при
съемке малых объектов или организовывать синхронное слежение за объектом съемки.
3) Малая выдержка экспонирования матрицы конфликтует с требованием накопления
достаточного количества света на матрице, так как объект разрешаемым размером в
30 см дает очень мало света на расстоянии 300 км.
И если первый пункт не вызывает особых проблем, о нем просто необходимо помнить
и об этом рассказывают даже студентам астрономам на лабораторных работах
Вот пример методических
указаний Южного Федерального Университета (См. стр. 40-41.)
Это хорошо
понимают даже астрономы-любители.
Да и в википедии недвусмысленно намекается на очевидное (пространственное
разрешение), что результирующее разрешение оптической системы
«объектив-приемник» максимально тогда, когда разрешение объектива (в фокальной
плоскости) равно разрешению фотоприемника (матрицы) и сопровождается нехитрой
формулой по его нахождению.
Или, если простым языком. Фокусное расстояние должно быть подобрано так, чтобы
спроецировать минимальный разрешаемый угол (дифракционный предел или просто
выбранное разрешение) не хуже, чем в пиксел матрицы находящейся в фокальной
плоскости системы.
Здесь и далее мы подразумеваем именно такую ситуацию, там где мысленно оперируем
с изменяющимися цифрами (имеющегося или выбираемого нами) разрешения. При этом
не вдаваясь в инженерные подробности, как именно мы этого достигаем. То ли
другим зеркалом (что правильно), то ли «линзами Барлоу» (что попроще, но с
потерями) – неважно. Просто к сопряжению разрешения объектива и матрицы мы
относимся как к очевидному и естественному свойству конструкции.
То пункты 2) и 3) могут вылиться в серьезную головную боль разработчика.
Давайте посмотрим, как решали эти задачи разработчики "наших" космических телескопов.
Для начала разберем, как реализована оцифровка изображения у марсианского HIRISE.
"Одна из основных трудностей при получении изображений с высоким
разрешением - это высокая скорость сканирования поверхности ~3,2 км/сек Как собрать достаточное количество фотонов для создания
высококачественного изображения. Один из вариантов - запуск большого
телескопа, но его трудно разместить на космическом корабле с ограниченными
ресурсами. Другой вариант - вращение космического корабля, оптического
инструмента или сканирующего зеркала для снижения скорости наземного поля
зрения. Стратегия поворота инструмента используется в Compact Reconnaissance
Imaging Spectrometer for Mars, CRISM [Murchie et al., 2007]
Мы же решили использовать Time Delay Integration (TDI), в котором каждый
небольшой участок поверхности считывается до 128 раз для увеличения отношения
сигнал/шум. Детектор HEIRISE это прибор с зарядовой связью 2048 пикселей в
ширину и 128 пикселей в высоту для TDI. Мы можем выбирать, использовать ли все
128 линий, или 64, 32 или 8 линий в зависимости от яркости сцены, уровня
биннинга и выбором компромисса между "шумом" и "смазом". TDI требует очень
высокой стабильности и контроля за космическим аппаратом."
Итак, что же такое TDI?
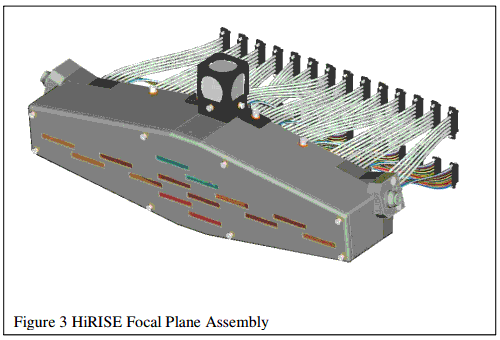
Фокальная плоскость HIRISE представляет собой 14 CCD (ПЗС) матриц со
спектральными фильтрами, размерностью 2048 пикселов х 128 линий. Каждый пиксель
имеет размер 12х12 мкм. Все 14 матриц перекрывают друг друга по краям на 48
пикселей. Таким образом эффективная полоса сканирования составляет ~20048 пикселов для красного цвета. И ~4048 пикселов для сине-зеленого и ближнего
инфракрасного диапазона.
Напомню, что технология ПЗС (Прибор
с Зарядовой Связью)
матриц имеет своей особенностью возможность передавать от ячейки к
ячейке накопленный фотодиодами заряд. Это напоминает работу сдвигового регистра
в двоичной логике. Но ячейки "регистров" передают друг другу не дискретные
состояния "1"- "0", а аналоговый потенциал, который был накоплен в
"потенциальной яме" пропорциональный полученному фотодиодом пиксела световому
потоку. Благодаря этому осуществляется удобное считывание «строки» (линии),
когда после закрытия затвора (механического или электронного) на «регистр»
подается тактовая последовательность, которая «сгоняет» аналоговые данные к
«краю» регистра, где находится усилитель. Таким образом получается аналоговая
последовательность видеосигнала одной строки. Ее можно либо использовать
как аналоговый видеосигнал, либо оцифровать.
Но зачем матрице HIRISE 128 строк? На полноразмерную матрицу это не тянет, а
сканировать поверхность можно и одной строкой.
Дело в том, что на этих 128 строках реализована так называемая технология TDI.
Time Delay Integration
Суть в том, что “накопленный ячейкой потенциал» можно «гонять»
регистром не
только вдоль «линии», но и «перпендикулярно», в соседнюю строку. Таким образом
реализуется временная задержка и интеграция фототока.
Представим. Матрица получает световой поток с поверхности Марса. Он очень слаб,
так как каждый пиксел "смотрит" на поверхность 30х30 см находящуюся в 300 км от
него. И высокая орбитальная скорость спутника вынуждает делать очень короткую
выдержку. 76 мксек. (точнее 74 мкс на 238 км высоты и 110 μсек при 320
- километровой высоте. Выше - больше.)За это время 30 сантиметровая полоса поверхности выходит из
поля зрения строки и подменяется другой.
Но. В это же время приходит тактовый импульс, который перемещает ничтожный
накопленный потенциал пиксела в соседнюю строку, в которую сейчас уже
сфокусирована исходная 30 сантиметровая полоса поверхности Марса. А сама
переходит в накопление фототока следующих подошедших 30 см. поверхности.
Во второй же строке отэкспонированный фототок складывается с потенциалом
первой.. И в следующие 76 мксек передается дальше. Третьей строке…
Таким образом, когда изображение синхронно пробежит по 128 линиям, оно окажется
не «размазанным» по матрице, а «накопится» 128 раз. После этого оно уже может
быть считано обычным образом.
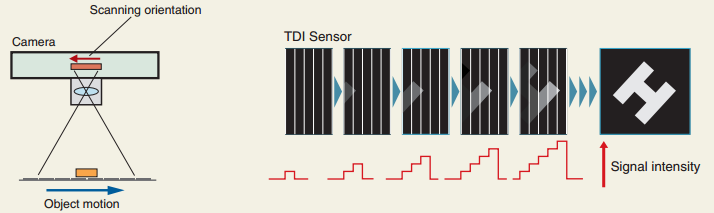
Изображение "проявляется" все четче, по мере пробегания от линии к линии.
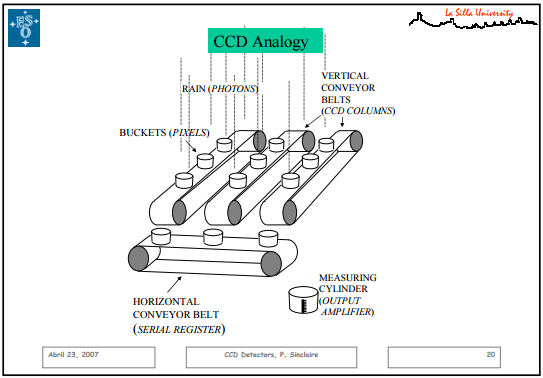 Детская
аналогия процесса выглядит примерно так...
Детская
аналогия процесса выглядит примерно так...
Сверху в виде "дождя" сыплются фотоны. Они попадают в мисочки на конвейерах, которые движутся синхронно с пролетающей "тучей" (изображением поверхности). Т.е. в любой момент времени в мисочку попадают фотоны с одного и того же участка "пиксела" "тучи" (сканируемой поверхности). Мисочки пробежав через 128 линий и накопив максимальный "заряд" опрокидываются на завершающий (считывающий) конвейер, который получив данные всей строки включается и быстро сливает их в "ведро", которое на входе меряет объем заряда накопленный каждой мисочкой. И таким образом, получает изображение строки.
(В общем случае матрицы HIRISE позволяют считывать данные не только после 128-й
линии, но и после 8, 16, 32 или 64 линий выбираемые в зависимости от яркости снимаемой
картины.)
Этот процесс чем-то напоминает «механическое протаскивание матрицы» синхронно с
перемещающимся изображением с целью увеличить время экспонирования. Но
реализован он в электронном виде. И нет никаких движущихся, неточных и
ненадежных частей.
Очень хорошее описание TDI технологии есть здесь. (1991г. pdf англ.). Еще есть интересная работа о TDI в астрономии (наземной).
К сожалению, как это нередко бывает у NASA, и здесь не обошлось без некоторой "таинственной мути". Мне не удалось найти никакой документации матриц, которые были использованы в HIRISE. Кратко и разрозненно описываются параметры, но документация остается за кадром. Очень долго пришлось искать разработчика. Нигде в описаниях он не встречался. Пока не попалось сообщение английской компании "e2v" о том, что "наш сенсор поймал спейскрафт на Марсе"
7 NOVEMBER 2008 e2v image sensors capture first ever image of spacecraft landing on MarsТолько после этого я обнаружил слова о некой e2v в "благодарностях" от разработчиков HIRISE, без упоминаний "за что конкретно".
Во многих статьях встречаются краткое описание свойств матрицы (размерность, тип, величина пиксела), но нигде невозможно увидеть документацию на нее (хотя частотные характеристики были бы очень информативны). Даже название удалось найти чисто случайно и ненадежно в виде упоминания " HIRISE Планируется установить 14 матриц CCD89" со ссылкой на закрытую, доступную лишь за деньги работу по разработке фокальной плоскости HIRISE. Смысла платить и скачивать ее я так и не увидел, так как - "планируется" это не "установлено". И больше нигде такая матрица как "CCD89" не обнаруживается.
Прямой запрос разработчику с просьбой посмотреть на документацию матрицы HIRISE направленный в два разных департамента был проигнорирован. Хотя почему-то матрицы современного Кепплера или древнего Хаббла той же фирмы описаны намного подробнее и открыто.
Еще один интересный момент. В брошюре официального дистрибьютора e2v перечислены космические миссии, в которых участвовали их матрицы. Действительно громкие миссии. Хаббл... Кеплер,...Curiosity..., GAIA... но не менее эффектный MRO скромно обойден молчание. Странно все это как то.
В то же время легко находится документация японских TDI матриц, полностью подходящих под упоминаемые свойства. (Размерность, физическая величина пиксела, возможности считывания не только с последней линии, оптический диапазон, обратная засветка.)
Ну да ладно. "Странно" - к делу не подошьешь. Давайте разбираться с тем, что мы имеем. Этого тоже немало.
В отсутствии каких-либо альтернатив в своих "мысленных" экспериментах, мы будем опираться на документацию матриц HAMAMATSU, так как по всем(!) явно упоминаемым в документации по HIRISE свойствам она подходит на эту роль. А именно на матрицу S10201-04-01.
| Type no. | Number of total pixels (H x V) |
Number of effective pixels (H x V) |
Number of ports |
Pixel rate (MHz/port) |
Line rate (kHz) |
Verticaltransfer | Applicable*1 camera |
| S10200-02-01*2*3 | 1040 x 128 | 1024 x 128 | 2 | 30 | 50 | Bi-directional | - |
| S10201-04-01*2*3 | 2080 x 128 | 2048 x 128 | 4 | Cl0000-801/-A01 | |||
| S10202-08-01 | 4160 x 128 | 4096 x 128 | 8 | - | |||
| S10202-16-01 | 4224 x 128 | 40% x 128 | 16 | 100 | - |
По сути нам интересны лишь временные характеристики матриц, которые напрямую связаны с "временным" разрешением и таким образом мы сможем показать, что результаты в принципе достижимы. (Если не с матрицей e2v, документации которой мы не имеем, то хотя бы с матрицей Hamamatsu.)
Максимальная частота вертикального переключения линий HIRISE 1/76 мксек~13 кГц, что также вписывается в возможности данной матрицы, которая может переключать строки со скоростью до 50 кГц.
В общем случае для просмотренных мною TDI матриц разных фирм (например TDI матрицы BAE или Teledyne Dalsa) этот параметр довольно критичен. Для большинства из них 10-20 кГц - потолок возможностей.
Кстати, в упомянутой выше
работе есть фраза о том, что "74 мксек~(13,5
кГц) - предел определяющийся электроникой". Если это расценить как
предельную частоту переключения "не найденной нами матрицы
CCD89", а не ограничениями выбранной схемы, то это соответствует
наиболее медленным образцам из просмотренных матриц TDI.
Понятно, что для задач HIRISE этого вполне достаточно,
но для наших дальнейших рассуждений эта частота важный фактор.
Теперь, когда Вы представляете себе каким красивым инженерным решением разработчики ушли, как от недостатка света, так и от "смаза" изображения при высокой скорости сканирования поверхности, Вы сможете в полной мере ощутить "грандиозный" замысел разработчиков LROC.
В качестве матрицы в нем использована обычная, древняя, "однострочная" матрица Кодак KLI-5001G. Восьмое издание ее документации приходится еще на 2002 год, продается по 75$. Какой там "SPACE QUALIFIED"!
Размерность 5064х1. Размер пиксела 7µm. Считывание производится по четным и нечетным пикселам в два регистра (по обеим сторонам матрицы), после чего данные строки сгоняются к усилителю на обработку.
Еще надо бы добавить, что минимально время интеграции Line/Integration Period 203.2 µs min.
- Ну и что?
-
А то, что при при орбитальной скорости 1680 м/с
минимальный разрешаемый размер по времени экспонирования будет 34 см (и это мы
еще не задумались о том "а достаточно ли нам света?").
То есть заявляемое НАСА разрешение в 25 см в принципе недостижимо с любой орбиты или матрица
у "космического девайса"
работает на запредельной для нее частоте, как у кухонного "специалиста по компам"
- "геймера-оверклокера", - "авось не сдохнет". Понятно, что
параметры недокументированного режима никем не гарантируются хотя бы потому, что
переходные процессы не успевают установиться.
Но на самом деле она и не работает. Так как ее возможности упираются в потолок быстродействия.
Подтвердить достижение "временного" предела матрицы, можно простым сравнением разновысотных снимков из атласа луны LROC.
Например:
Снимок с высоты 25,3 км (Посадочный модуль можно найти в центре полосы
справа)
Данные снимка:
Высота - Spacecraft altitude 25.38
Разрешение по ширине -
Scaled pixel width 0.3
Разрешение по высоте -
Scaled pixel height 0.56
Снимок с высоты 45 км. (Посадочный модуль находится в центре слева)
Высота
- Spacecraft altitude 44.91
Разрешение по ширине -
Scaled pixel width 0.45
Разрешение по высоте -
Scaled pixel height 0.55
Как мы можем заметить, при смене орбиты разрешение изменяется лишь в "ширину" пиксела. То есть "оптическое разрешение" Разрешение "в высоту", (т.е. вдоль орбиты), остается практически неизменным, (на более низкой орбите даже хуже) так как связано с достижением скоростного предела матрицы. И перепрыгнуть через него невозможно как ни снижай высоту "спэйскрафта". Она просто не успевает сделать более короткую выдержку.
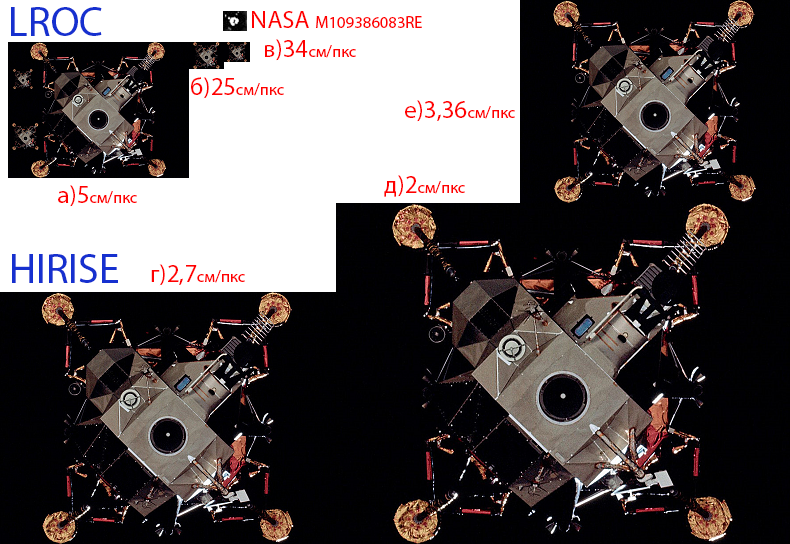
В конце статьи приводятся изображения "лунных модулей" пересчитанные "попиксельно" при всех упоминаемых в статье "разрешениях". Сравнив их с изображениями представленными НАСА из картинки в начале статьи Вы можете убедиться в том, что наиболее близким является именно разрешение "в) 34 см" а в действительности еще хуже.)
Кроме того. Мы видим,
что в один пиксел матрицы укладывается 5 "дифракционных пределов" оптики. Налицо
очевидное рассогласование разрешающей способности матрицы и оптики, связанное с
не менее очевидным недостатком света из-за ничтожного времени экспозиции.
Не правда ли, - "отлично" продуманная конструкция?
Достойная того, чтобы грузить ее на ракету и тащить на Луну.
Так их там еще и двое.
Снимает плохо? Ничего. Зато вдвоем они наснимают в два раза больше. (LROC NACs)
Здесь есть таблицы их индивидуальных обмеров и достигнутых характеристик (стр. 16-17).
Давайте попытаемся оценить реален ли способ увеличения разрешающей способности
LROC путем замены однострочной ПЗС матрицы Codak на 128 строчную TDI матрицу Hamamatsu?
(О разнице матриц мы спорить не будем. Так как управлять и считывать TDI матрицу ничуть не сложнее, чем обычную. А квантовая эффективность Codac процентов на 5-10 ниже, чем у Hamamatsu. Кому интересно, подробнее можно рассмотреть графики в документации матриц.)
С оптикой мы разобрались ранее, она позволяет разрешать объекты до 5 см. Успеет
ли матрица Hamamatsu передавать изображение между строками матрицы?
Первая космическая 1,68 км/сек. Делим на 5 см. получаем ~ 33,6 кГц.
При том, что матрица позволяет переключать до 50 кГц, это ей вполне по силам.
Теперь что касается светового потока. Уменьшив с 25 до 5 см. разрешаемый пиксел,
мы, соответственно уменьшили площадь, с которой снимается свет, а значит и
световой поток на пиксел изображения в 25 раз. Но одновременно мы увеличиваем в
128 раз количество экспонирования строки. Но (и это важно!) при меньшем времени
экспонирования одной строки. (5 см. при сканировании камерой пролетают в 5 раз
быстрее чем 25 см..)
Прикинем эквивалентное время экспонирования двух матриц. (Здесь и далее мы исходим из предположения, что однострочная матрица Кодак работает на пределе чувствительности, что, возможно, и не так. Но она для нас опорный ориентир по требуемой освещенности.). На первой космической Луны она экспонирует 25 см. поверхности с частотой 6,72 кГц. Ну, или 1/6720 сек. То есть 0.00015 сек. (Что, как мы заметили ранее, меньше, чем предельно-минимальные 0,000203 сек из документации. "Галочку" на память ставим, но не придираемся. Нам интересна другая матрица.)
Hamamatsu экспонирует 5 см.поверхности (1/33,6 кГц)*128, или 0,0038 сек.
Соответственно соотношение времени экспонирования 0,0038/0,00015=
25,3 раза.
То есть, при переходе на более высокое разрешение (25см. –> 5 см) и,
соответственно, в 25 раз более слабую освещенность пиксела (соотношение
площадей), 128-ми строчная Hamamatsu,
экспонирует в 25,3 раза дольше. И, значит, интегральное количество света,
приходящееся на один пиксель, не ухудшится по сравнению с матрицей Кодак. Даже
немного улучшится. Вот это и есть предел разрешения телескопа, когда
сопрягаются разрешение матрицы, ее чувствительности и возможности имеющейся оптики.
Таким образом, совершенно корректно и безболезненно достигается разрешение в 5 см при той же апертуре, что имеется в наличии. (Безусловно зеркало нужно будет сопрячь с большими размерами пиксела Hamamatsu и добавить "увеличения", чтобы сопрячь дифракционный предел с матрицей. А это все фокусное расстояние, которое должно взрасти в 8,5 раз. Ну не просто так фокусное расстояние "Hirise" 12 метров.)
При этом происходит красивое схождение трех "пределов": дифракционного, освещенности и "временного" матрицы.
А что получится, если мы «вызовем» HIRISE в командировку от Марса на Луну? Какое
разрешение при данной методике мы сможем достичь в условиях согласования
оптического и матричного разрешения. Напомню, оптика позволяет HIRISE разрешать
до 2 см на орбите LRO (20 км.).
Большая апертура HIRISE позволит получить выигрыш в эквивалентной
LROC освещенности пиксела в 6,5 раз. (Соотношение
площадей апертур) Другими словами, мы сможем получить выигрыш в линейном разрешении в
квадратный корень из этой величины. Но поскольку вместе с уменьшение размера
минимальной наблюдаемой поверхности проецируемой на пиксел матрицы
пропорционально уменьшается и время экспонирования (т.к. орбитальная скорость
неизменна), то падение интегральной (накопленной) освещенности пиксела пропорциональна кубу отношения линейных размеров.
(Накопленную освещенность можно представить как "объем
кубика" со стороной равной выбираемому разрешению. Возможно это потому, что "третья"
координата - "время экспозиции" при постоянной орбитальной скорости
пропорциональна разрешаемому размеру. А интенсивность света пропорциональна
площади, и, соответственно "квадрату" разрешаемого размера.) То есть
6,5 раз выигрыша в световом потоке позволят улучшить разрешение в 6,51/3=1,866 раз
без потерь в накопленной освещенности пиксела.
То есть 2,68 см. Чуть-чуть не дотянули до оптического разрешения в 2 см..
Другими словами, достижение разрешения дифракционного предела HIRISE в 2 см недостижимо без падения интегральной экспозиции при простом переносе его на лунную орбиту.
Но есть еще и конструктивная проблема. 2 см поверхности это частота переключения строк – 84 кГц. Что превышает возможности "используемой" матрицы. Нужно использовать другую – S10202-16-01, которая позволяет переключать строки с частотой до 100 кГц, что теоретически позволило бы «разрешить по времени» до 1,6 см. Но проблемы с освещенностью это не решит.
Можно, конечно, установить вторую матрицу так, чтобы она перекрывала поле зрения первой и заниматься компьютерным "биннингом", или и в самом деле механически дергать матрицу с целью снижения скорости пролета изображения сканируемой поверхности, но все это уже не "спорт" а "начетничество".
То есть при замене матрицы на более скоростную, мы, конечно сможем получить
"временное" разрешение около 2 см.
НО! При этом мы проиграем в 2,4 раза (2,7/2)3
в эквивалентной освещенности пиксела по
сравнению с «эталонной» матрицей LROC. (Про которую мы точно знаем, что она
работает.)
Вполне возможно, что этого хватит для фотографии, тем более, что наша
гипотетическая матрица имеет лучшие параметры, - но (!) - беспроигрышный (в эквивалентной освещенности пиксела) по отношению к LROC предел
разрешения находится где-то на 2,7 см. Все, что меньше этого порога, начинает
проигрывать в освещенности, и, соответственно, падением отношения сигнал/шум.
Если же мы не станем заменять матрицу на более скоростную и ограничимся
имеющими у нее 50 кГц, то получим разрешение 3,36 см с двукратным запасом по свету по
отношению к LROC. (3,36/2,7)3
Краткое резюме:
1) Заявленное НАСА разрешение в 25 см камеры LROC находящейся высоте 20 км в действительности недостижимо ни на какой высоте. Так как используемая матрица Codac KLI-5001G согласно ее документации не позволяет иметь время экспонирования строки менее чем 203,2 мкс. Что на первой космической скорости Луны составляет 34 см И по факту мы не видим в лунном атласе LROC фотографий с разрешением лучше полуметра "в высоту" (параллельно орбите), даже на орбитах порядка 25 км над поверхностью.
2) При замене одностроковой матрицы LROC на TDI матрицу, аналогичную используемой в HIRISE (На самом деле мы говорим о ее ближайшем аналоге S10201-04-01 , так как обладаем документацией на нее) и изменении фокусного расстояния позволяет достичь разрешения в 5 см (в 5 раз по сравнению с "заявленным" НАСА разрешением в 25 см. Хотя просматривая исходники увидеть хотя бы один снимок с разрешением лучше чем 0.4 м пока что не удалось. Да и само "разрешение" в 0.428 m/pix берется непонятно откуда. Скорее всего, как какое-то "среднее арифметическое" из "прямоугольного пиксела" 0,56 и 0,3 (разрешения вдоль и поперек орбиты), что некорректно.

5 см/пиксел это вот такой уровень детализации снимка. ( Размеры фотографируемых объектов можно посмотреть здесь.) Справа приведен примерный масштаб следов астронавтов (след 10х30 см)
Слева вверху приведен пример детализации 34 см на пиксель.
Слева внизу 25 см на пиксель.
При этом сопряжение по всем параметрам - дифракционному пределу, освещенности и «временному» разрешению матрицы показывают прекрасную сходимость в данной «точке». Ни по одному из параметров не наступает ограничение. Решение - "красиво".
3)
Гипотетическая ситуация наблюдения Луны камерой HIRISE позволяет достичь
разрешения в 3,36 см. с высоты 20 км. без каких-либо физических ограничений (опять же
мы
ориентируемся на матрицу
S10201-04-01 - 50 кГц, так как частота переключения строк оригинальной матрицы HIRISE нам
достоверно неизвестна.). При этом «железо»
(в случае замены матрицы на более скоростную -
S10201-16-01) позволяет «разрешать» объекты до 2
см. Но попытки "увидеть" меньше 2,7 см будет сопровождаться быстрым ("кубическая"
зависимость) уменьшением эквивалентной
(интегральной) освещенности пиксела матрицы до 2,5 раз (при 2-х см) по
сравнению с освещенностью пиксела LROC. То есть, если освещенность пиксела LROC
работает без запаса по освещенности на пределе чувствительности ПЗС матриц, то разрешение меньше
2,7 см
невозможно. Необходимо искать другие инженерные решения. Если же запас по
чувствительности есть, то разрешение можно поднять до 2 см.
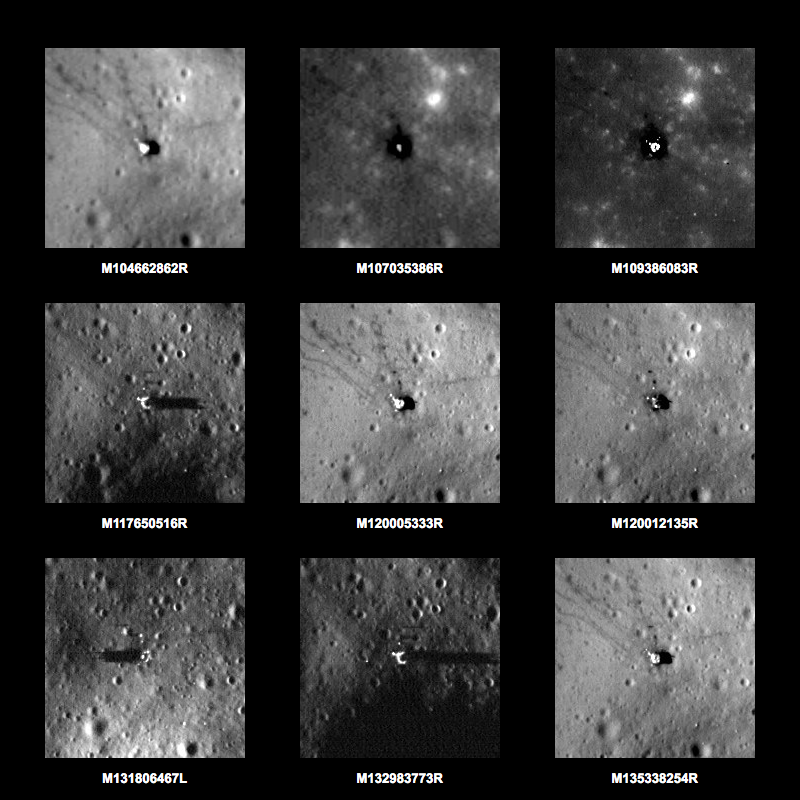
Для наглядного представления "о чем речь" на рисунке приведены все, упоминаемые в статье разрешения. И добавлен, пожалуй наилучший из виденных снимков NASA, на котором хотя бы угадываются тарелки посадочных опор. (Правда угадываются они уже после "кропотливой работы" NASA-вских дизайнеров. В оригинале M109386083RE (в центре полосы слева) все выглядит несколько печальнее.)
Но в целом данное решение не столь "элегантно".. В том смысле, что оно громоздкое и, хотя и ведет к двукратному росту разрешения по сравнению с "модернизированным" LROC, не все факторы "красиво сходятся" в одной точке.
Однако в любом случае мы видим, что довольно простыми, хорошо известными и уже давно отработанными инженерными решениями разрешающая способность LROC может быть поднята в 5 раз, (От "заявленной" 25 см. Если же говорить о фактической 0,55 м вдоль орбиты, то более чем в 10 раз) причем без существенного изменения конструкции оставаясь в тех же массогабаритных показателях. По крайней мере одну из камер "высокого разрешения" вполне можно было бы перевести на действительно высокое разрешение.
Кроме как острым нежеланием "увидеть лишнее", трудно объяснить, почему эти несложные мероприятия не были проведены, так как физические возможности установленного оборудования это позволяют и работающие схемы "в металле" а не "в теории" уже имелись.
На
основе всего вышеизложенного мы можем вполне уверенно утверждать, что
высокая разрешающая способность LROC была занижена
искусственно или, что то же самое, сознательно нереализована.
Поэтому повторяем вопрос.
Что же такого нужно было привезти на Луну полвека назад, что до сих пор это так стыдно показать миру?
Аверин Игорь
{kind=link}
{kind=link}